사진 by Wikimedia
1 개요
Gyroscope. 방식마다 다르지만, 공통적으로 뭔가의 스핀에 의해 발생하는 Gyro Effect 를 사용하여 원점위치를 역추정, 현재의 방향이 얼마나 뒤틀렸는지를 역산출하는 기계다. 그래서 방향성(Orientation)을 측정할 때 쓰게된다.
여기에 들어가는 Gyro Effect 는, 물체가 고속으로 회전하여 다량의 키네틱을 보유하게 될 때, 스핀축방향으로의 정렬을 유지한다는 것으로, 자이로스코프의 회전축은 변하지 않는다는 것을 의미한다.
그냥 쉽게 말하자면 팽이를 생각하면 된다. 일단 한 번 빠르게 회전시킨 팽이는 외부에서 충격이 가해져도 쓰러지거나 하지 않고 쉽게 자세(회전축)을 바꾸지 않는데 물론 죽어라 때리면 넘어간다. , 이는 일종의 관성력인 회전관성모멘트 때문이다. 그래서 일단 고속으로 팽이를 회전시킨 다음 그것을 기준축 삼아 얼마나 돌아갔는지를 측정하는 것.
또한 이를 통해 자이로스코프에 가해지는 토크는 90도 뒤틀려서 출력된다는 것도 알아두자.
하지만 밑에 언급될 MEMS나 광자이로는 정작 이러한 회전관성력을 사용하지 않는다. 다만 여태까지 같은 장치를 자이로스코프라고 불러왔으니 똑같이 자이로스코프라 부르는 것.
2 유형
2.1 Inertial

레퍼런스 스타일의 자이로스코프로, 진짜 쇳덩어리를 돌려서 자이로 효과를 이끌어낸다. 내부 모터는 토크는 아주 낮으나 매우 고속으로 회전한다. 궁금하면 유튜브 찾아보자. 가용속도까지 올라가는데 몇분 걸린다. 여튼간에 이런 자이로스코프의 각 축을 센서와 연결하여 사용하게 된다. 일반적으로 정밀한 센서는 각도센서가 아니라 각가속도 센서다. 쉽게 말해 얼마나 '빠르게 가속되었는가'. 자이로의 회전축을 기준으로 현재 센서가 달린 몸통 부분이 회전한 각도 그 자체를 측정하는것이 아니라, 얼마나 빠르게 회전속도가 올라갔는지라는 각가속도를 측정하므로 그냥은 현재의 각도 자체를 알 수 없고 적분을 통해 각도를 알 수 있다. 문제는 연속적으로 처음 기준값에서 계속 적분하는거라 시간이 지나면 지날수록 오차가 쌓인다. 그래서 경우에 따라서는 내부적으로 이 오차값을 다른 참조값을 이용하여 측정하여 현재 각도를 계산할 때 계속 이 오차값을 보정하여 사용한다.
2.2 MEMS
초소형 자이로스코프. 보통 일반 반도체칩 만하다.
쉽게 설명하기 위해 대포를 쏜다고 생각해보자.
대포를 쏠 경우, 대포알은 직선으로 날아가게 된다. 하지만 날아가는 동안에 (수십초~수분) 지구가 자전을 하기 때문에, 지도 위에서 볼 경우 대포알의 경로는 직선이 아니라 한쪽으로 치우친 형태(곡선)를 띄게 된다.
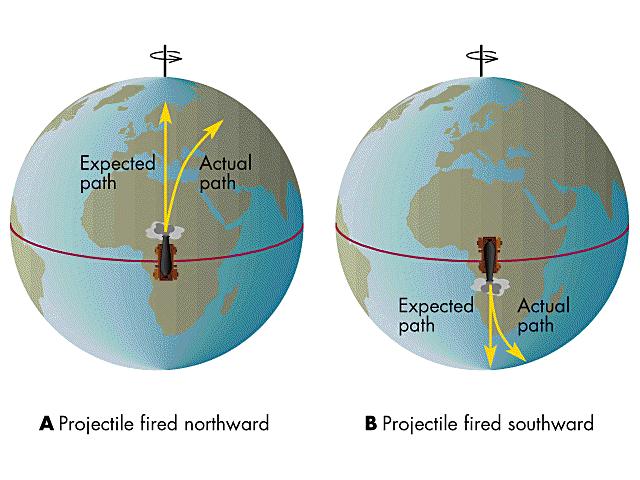
만일 지구의 자전 속도가 지금보다 빠르다면 그 곡율은 더 심해질것이고, 만일 느리다면 더 직선에 가까워 진다.
이렇게 직선경로가 한쪽으로 휘는 현상을 설명하는것이 코리올리 효과이고, 이것을 이용해서 외부에서 가해진 각속도를 구할수 있다.

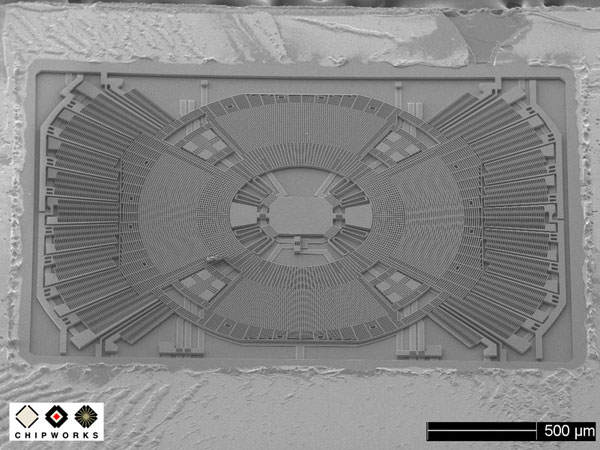
위에 보이는 SEM 사진은 자이로스코프가 아니라 가속도 센서의 SEM 사진이다. 얼핏보면 복잡하지만, 스프링에 의해 메달려 있는 mass 를 생각하면 된다. 외부에서 힘이 가해지면 mass는 그에 따라 움직이게 되고, 고정 되어 있는 electrode 사이의 간격(gap)이 변하게 된다. 간격이 변함으로서 capacitance (C=e0*A/d)가 변하게 되고, 그것을 회로를 이용해 전기적 신호로 읽어낸다.
엄청나게 작은 크기로 만들 수 있다는 장점이 있으나 상대적으로 정밀도자체는 좀 떨어진다. 보통 소형기기나 측정센서, 그리고 휴대폰이나 게임기의 모션센서 등에 쓰인다. 미사일의 경우에는 정밀도가 아주 높지 않아도 되거나 비행시간이 짧은대신 소형센서가 필요한 경우 이 MEMS 자이로스코프를 쓰기도 한다.
2.3 Optical
1개 모듈 도면.

1개 모듈 실사.
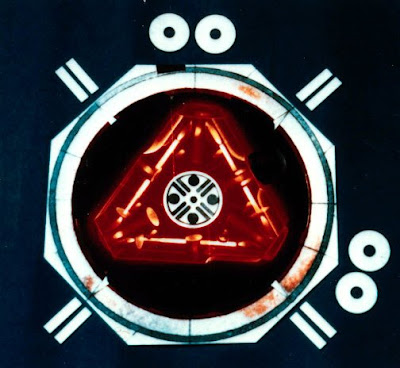
1개 모듈 작동중.아크 리액터?! ⊙△⊙
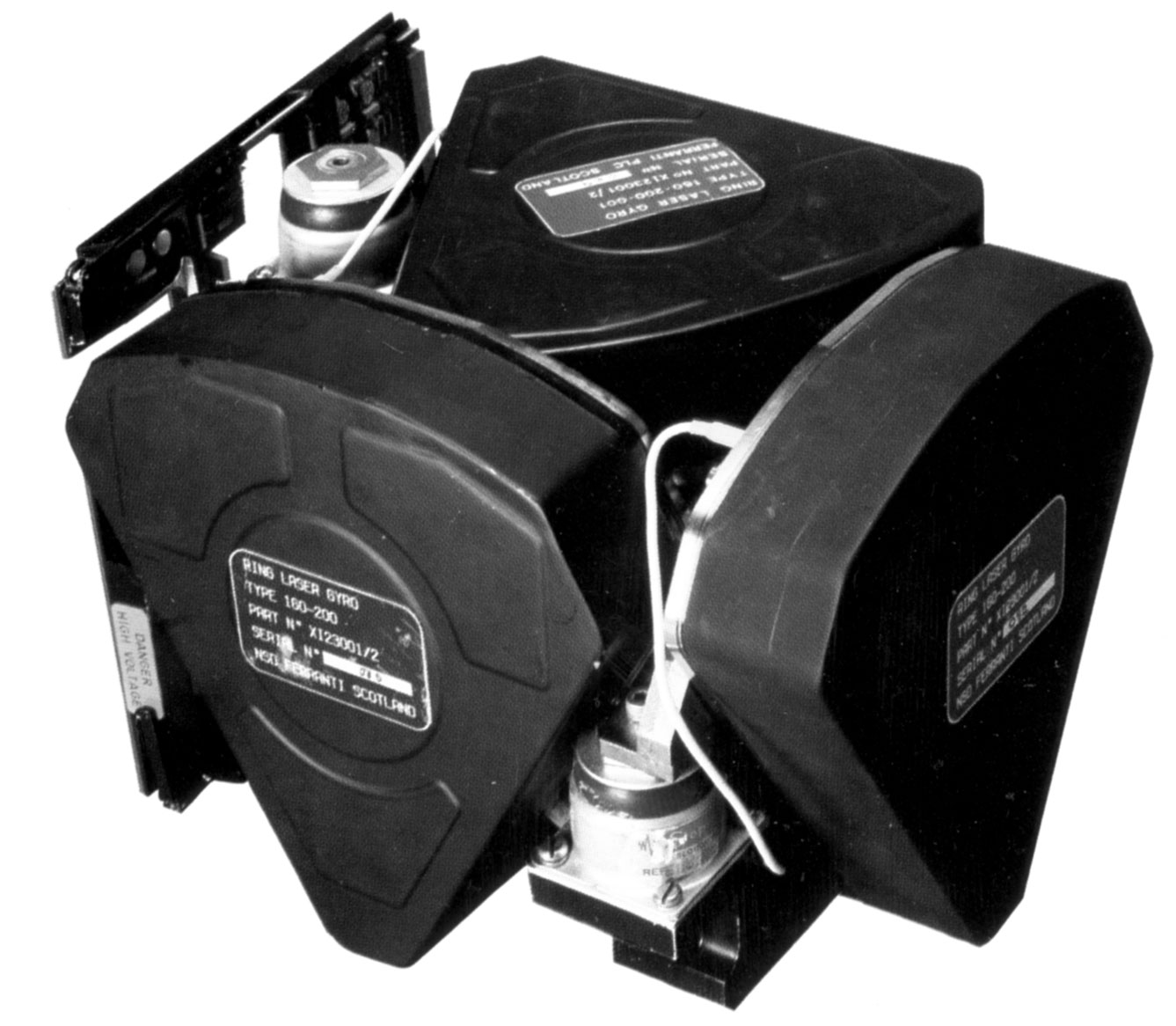
3개짜리.
빛의 간섭효과등을 이용하여 만든 자이로스코프. 보통 Ring Laser Gyroscope라고도 한다. 개념 자체는 굉장히 오래되었으나 60년대 후반부터 항공기나 미사일등의 정밀 센서로 각광을 받고있다. 아무래도 기계식 자이로스코프보다는 가벼운것이 특징. 또한 일반적인 반도체 자이로스코프에 비해 극도로 높은 정밀도를 가지기에 비행기나 탄도미사일 등 관성항법을 수행하는 경우엔 꼭 이 자이로를 사용한다. 원리는 밑의 광섬유 방식 레이저 자이로스코프와 동일하나 광섬유대신 거울로 레이저의 경로를 설정한다는 점이 다르다.
아래 내용은 KAIST 김병윤 교수의 수업 PT 중 일부입니다.

1. 광원에서 빛이 나온다.
2. 방향성 결합기 통과 -> 2갈래로 쪼개짐
3. 광섬유 코일을 통과
4. 하나는 편광기를 지나게 해서 위상을 레퍼런스로 고정
5. 나머지 하나는 그냥 회전하는 자이로스코프에서 빛은 Sagnac 효과에 의해 진행길이 변화에 의한 위상차가 발생하므로, 방향성 결합기에서 레퍼런스와의 보간 간섭 때에 출력이 낮아짐. 정지한 상태에선 둘 다 같은 위상이므로 최대 출력이 나옴
6. 이걸 그냥 포토커플러로 받아들임
7. 적당히 처리하기.
란 원리로 작동하는 자이로스코프이다. 이 센서는 각가속도 값이 아니라 각속도값이 나오므로 각도를 구하려면 한번만 적분하면 된다.
3 여담
6축 자이로센서는 저런 자이로모듈이 6개 방향에 대해 들어있다는 말이다. 보통 X,Y,Z 축에 대해 회전각을 내보내지만, 이런 애들은 비행기용 3축 시스템을 더해서 나오기도 하고, 아니면 특별하게 확인해야할 다른 각에 대해 검출한다.
그리고, 자이로는 매우 비싼 물건으로, MEMSIC 같은 전문회사 제품은 1700만원 정도의 고가 제품이다. 이는 MEMS 자이로 칩도 예외는 아닌지라 자이로칩셋도 사보면 알겠지만 무라타 1축 자이로가 5만원.(...)
물론 이것도 미사일이나 우주선에 들어가는 것에 비하면 무지하게 싼 편이다. 저런것에 들어가는 자이로는 보통 억소리 난다.
휴대폰에 3축 자이로가 들어가니 한번 생각해보면 좋을것이다.
닌텐도 Wii의 주변기기인 눈차크에도 꽤 쓸만한 센서가 들어가 있어서, 센서만 떼어다 멀티콥터등에 사용하기도 한다. 일명 멀티위. 멀티위에는 눈차크와 모션플러스가 필요한데, 눈차크에는 가속도 센서, 모션플러스에는 자이로가 들어있기 때문이다(위모콘 자체는 필요 없다).
보통 항공기나 미사일, 선박등은 이 자이로스코프와 가속도계를 조합하여 관성항법을 수행한다. 자이로스코프의 오차보정방법으로는 아폴로시대부터 열심히 사용하고 있는 칼만 필터가 있다. 칼만 필터는 물리적인 필터가 아니라 동역학모델과 다른 센서를 주기적으로 이용해서 자이로스코프의 오차(일반적으로 바이어스)를 검출하는 소프트웨어필터이다. 여담이지만 인공위성에서는 별을 이용한 스타센서를 사용해서 자이로스코프의 오차를 보정하는 방법이 널리 쓰이고 있다.
최근 스마트폰에 자이로스코프를 탑재하는 제품이 늘면서 이를 마이크 대용(!)으로 쓰는 방법도 개발되었다. 아직은 대화를 하는지 안 하는지 인식만 가능하다고 나왔지만 이제 마이크 퍼미션을 제한한다고 도청이 원천봉쇄된다고 장담할 수는 없다는 뜻이다.