1 개요
제어 이론에 기반하여 동적 시스템의 동작이 원하는 대로 이루어지도록 하는 방법을 연구하는 공학의 한 분야.
미분방정식에서 나아가, 라플라스 변환이나 Z 변환과 같은 수학적 방법들이 동원되며, 이를 이용하여 제어를 해야 하는 대상(이하 플랜트)을 모델링하거나 근사화(Approximation)한 모델링을 수행하고, 특정한 입력에 대하여 플랜트가 원하는 동작을 수행하도록 컨트롤러를 제작한다.
기계공학과, 전자공학과에서 공통으로 배우는 과목이며 따로 제어공학과가 개설되기도 한다. 메카트로닉스의 바탕이 되는 학문 중 하나이다.
2 기본적인 컨셉
표준 되먹임(Feedback) 제어 시스템은 아래 블록 다이어그램과 같다.
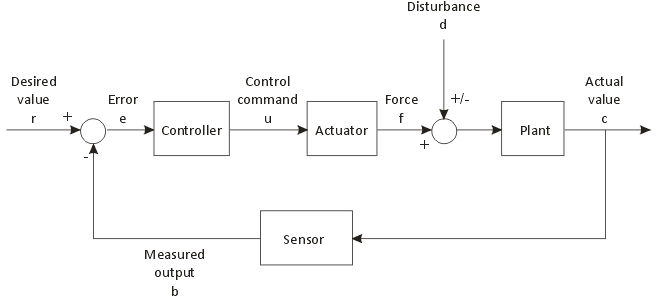
예를 들어, 내가 원하는 각도를 입력하면, 그 각도만큼 모터가 작동하는 모터 위치 제어 시스템이라고 가정하자. 이때 플랜트(Plant)는 모터가 되며, 컨트롤러(Controller)는 디지털 마이크로 컨트롤러나 아날로그 컨트롤러가 된다. 구동기(Actuator)는 컨트롤러에서 출력되는 신호를 플랜트의 입력 형식에 맞게 변환해 주는 장치이며, 컨트롤러가 디지털 컨트롤러라면 PWM이나 DAC와 같은 부품이 된다. 마지막으로 센서(Sensor)는 이 경우 위치 제어이므로 모터의 각도를 감지하는 센서로, 증가형 엔코더나 절대형 엔코더, 혹은 경우에 따라 카메라를 이용한 영상처리장치나 자이로센서 등이 된다. 컨트롤러는 센서에서 계측된 내용을 신호로 받아, 내가 원하는 결과값(r)과의 차이를 입력으로 받는다.
이러한 블록 다이어그램은 보통 라플라스 변환으로 모델링된 함수들로 각 블록이 채워지며, 이를 하나의 블럭으로 통합하는 과정을 거쳤을 때 그 블록의 내용을 전달함수(Transfer function)라 한다. 시스템의 출력은 아래 그림과 같이 전달함수의 특성에 따라 달라지며, 자세하게는 전달함수의 극점(Pole)과 영점(Zero)을 복소 평면에 배치했을 때의 그 위치에 따라 달라지며, 그에 따라 결과값의 안정도(Stability)나 반응속도, 정상 편차(Stedy state error)가 달라진다.

제어공학자는 전체 시스템의 출력이 원하는 대로 나오게 만들기 위해 컨트롤러의 특성을 수정하여 플랜트만 존재할 때와는 다르게 전체 시스템의 극점과 영점의 위치를 재배치한다.
3 난이도
기본적으로 미분방정식이나 라플라스 변환과 같은 공학수학 지식이 필요하며, 좀 더 고급의 디지털 제어를 수행하려면 Z 변환에 대한 지식과 선형대수학에 대한 기초적인 지식이 추가적으로 필요하다. 그러나 보통 학부생 수준에서는 디지털 제어를 공부하지 않고 졸업하는 경우가 더 많다. 그러나 디지털제어를 공부한다고 하여도 그 내용이 직관적으로 빠르게 이해되지 않기 때문에 많은 학생들이 고생하는 과목이기도 하다. 덕분에 재수강도 엄청 많다. 게다가 제어를 수행할 때에 워낙 여러 경우의 수가 있다 보니 다 외울 수 없어 오픈북 시험을 치르는 경우도 있다. 하지만 오픈북은 그만큼 어렵게 낸다 덕분에 제어공학을 전공하려고 한다고 하면 다른 학생들이 그것만으로 우러러 보는 경우도 있을 정도이다.
4 진출 분야
당연하게도 기계, 전자, 전기 분야로 가장 많이 진출한다. 그리고 이 세 가지 분야의 TO가 많기 때문에 확실히 취업율 자체는 좋은 편이다[1]. 하지만 제어공학과 학부 졸업생의 경우 취업율 대비 대기업 취업율은 좋지 않다는 이야기도 있다. 때문에 대학원 진학을 생각하는 사람도 많은 편이다.