- 이 문서는 플라이 바이 와이어로도 들어올 수 있다.
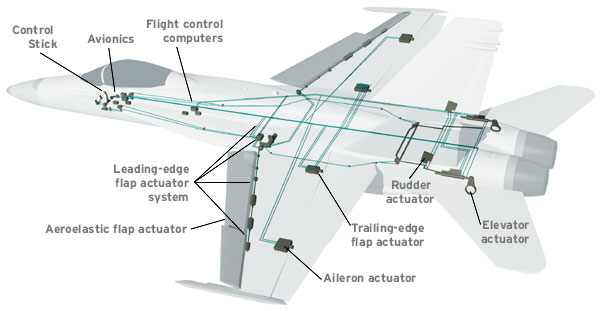
위 사진은 F-18 비행통제컴퓨터 Fly by wire 시스템 작동 구조도이다.
Fly By Wire
조종간과 항공기의 비행제어장치가 유압시스템처럼 물리적인 결합으로 이뤄지지 않고 전자제어시스템으로 연결되어있는것을 말한다. 굳이 번역하자면 전자비행제어방식 정도.
제트엔진 시대 이전 항공기들의 경우, 조종사의 팔 힘으로만 비행기를 움직였다. 즉 조종사가 조종간에 힘을 주면 강철케이블과 도르래 등으로 연결된 조종면이 그 팔 힘만 갖고 날개를 까딱까닥거렸다는 거다.[1] 하지만 항공기가 워낙에 무거워지고, 속도도 빨라지면서 사람의 힘만으로는 조종면을 움직이기 힘들어졌다. 그래서 자동차에서 보편화된 파워 핸들처럼 유압으로 힘을 증가시키는 기술이 적용되었고[2] 나중에는 아예 유압만으로 항공기를 조종하는 기술이 등장하였다.
유압식 조종시스템은 조종사가 조종간을 움직이면 그 조종간의 움직임에 따라 작은 유압밸브가 열리고, 이 유압밸브와 연결된 유압관을 통해 조종면에 있는 유압작동기로 힘이 전달된다. 그 힘은 유압작동기에 연결된 더 큰 유압밸브를 열고, 그 결과 유압작동기로 유압이 걸리면서 조종면을 움직이게 된다. 그런데 이 시스템의 문제는 유압을 유지할만한 관을 비행기 안에 설치해야 했던 탓에[3] 유압관 자체의 무게만 해도 만만치 않은 수준이었다는 것과, 모종의 이유로 유압시스템이 망가지면 조종면의 제어조차 어려워진다는 것이었다. 물론 항공기 시스템은 2~3중, 심지어 4중 이상으로 유압시스템을 만들기도 하지만,[4] 그럼에도 불구하고 모든 유압시스템이 망가져버리는 일본항공 123편 추락 사고 같은 상황도 발생할 수 있다.
그래서 최소한 조종간과 조종면을 연결하는 부분만이라도 유압시스템이 아니라 전선으로 써보자고 해서 나온 것이 바로 플라이 바이 와이어 시스템이다.
물론 플라이 바이 와이어 시스템이라고 유압이 필요 없는 것은 아니다. 아직 항공기의 조종면을 움직이는데는 전기모터보다는 유압시스템이 더 많이 쓰이며,[5] 그래서 최종적으로 조종면을 움직이는 역할은 여전히 유압작동기가 하는 경우가 다수이다. '몇 도를 움직여라.'라는 명령을 전달하는 매체가 이전에는 작은 유압관이던 게 전선으로 바뀐 것.
전선은 유압시스템에 비하여 무게가 훨씬 가볍기 때문에 전체 항공기의 무게를 줄일 수 있고, 또한 고압이 걸리는 유압관은 연질의 호스가 아니라 금속제 파이프를 사용하는 경우가 많기 때문에 항공기 내부 배치에 고민을 많이 해야 하는데, 전선은 어느 정도 유연성이 있어 항공기의 내부 설계가 파이프에 비해 상대적으로 쉽다.
이렇게 조종간-조종면을 전선만으로 연결하는 개념은 1950년대에 개발된 캐나다의 CF-105에 적용되었으며, 콩코드 여객기도 같은 개념을 사용하였다.
이름이나 초창기의 개념 및 적용 사례들만 보면 FBW는 단순히 조종사가 쥐고 있는 조종간과 실제 움직이는 조종면[6]의 사이를 전선으로 잇는 개념으로 보기 쉽지만, 현대의 FBW에는 더 중요한 개념 하나가 더 추가되었다. 바로 컴퓨터의 도움을 받는다는 것. 컴퓨터의 보정이 들어가야 진정한 현대의 플라이 바이 와이어 시스템이라 할 수 있다. 즉, 현대의 자동 항법 시스템은 FBW가 없으면 완성되지 않는다.
사실 항공기의 제어에 컴퓨터를 쓰는 것은 플라이 바이 와이어 시스템이 등장하기 이전에 이미 등장하였다. 이를테면 제2차 세계대전 중 일부 폭격기들은 폭격 조준 비행에 들어가면 조종사가 자동비행시스템을 켜게 되며, 이 때부터 폭격기는 정확히 일직선으로 비행한다. [7] 그리고 폭격 조준을 담당하는 폭격수가 작은 컨트롤러로 항공기를 미세조정하여 목표물을 정확히 조준한다. 즉 전자계산기도 없던 시절에 이미 아날로그 시스템을 이용하여 '항공기를 자동조종 한다.' 라는 개념이 있었다는 이야기다. 나치 독일의 Fw190 후기형과와 Ta152도 지멘스 K 23 오토파일럿을 가지고 있었다.
이후 항공기가 특정 상황에서 안정성이 떨어지는 것을 막기 위한 제어시스템이 속속 등장하기 시작한다. 처음에는 자이로스코프등을 이용하여 항공의 자세 등을 측정하다가, 특정 상황에서 항공기의 기수가 너무 흔들린다 싶으면 사람이 제어하지 않아도 컴퓨터가 자동으로 조종면을 움직여서 다시 원래대로 돌려 놓는 식이었다. [8] 이러한 시스템을 SAS(Stability augment system)라고 한다.
그리고 좀 더 발전한 개념이 항공기의 자세만 측정하는 것이 아니라 사람의 조종입력 값도 측정하는 것. 본래 항공기의 비행특성은 속도나 고도에 따라 크게 달라진다. 그래서 어느 속도에서는 기수를 10도 치켜들기 위해 승강타를 5도만 움직여야 한다면, 어느 속도에서는 기수를 10도 치켜들기 위해 승강타를 15도를 움직여야 하기도 한다. 즉 그때 그때 달라지는 항공기의 특성에 맞춰 조종사가 대응을 해야 했다. 그런데 제어시스템을 도입, 이것을 컴퓨터의 도움을 받는 식이 되었다. 계속 속도가 바뀌어도 조종사는 기수를 10도 들기 위해서 항상 똑같은 만큼만 조종간을 움직인다. 비행제어 시스템은 조종사의 입력값과 현재 측정된 항공기의 속도, 자세 등을 종합하여 여기에 조종면을 +5도를 더해줄지, 아니면 조종면을 오히려 덜 치도록 -2도를 해줄지 계산한다. 즉 조종사가 조종간을 10도 만큼 조종간을 당기면 예전 항공기는 똑같이 승강타가 10도 만큼 움직였다. 그러면 속도에 따라 실제로는 기수가 15도가 들릴 수도 있고, 5도만 들릴 수도 있었다. 그러나 제어시스템이 적용되면 사람이 10도 만큼만 조종간을 움직여도 제어시스템이 여기에 +5도를 더해서 실제로는 승강타가 15도가 움직이도록 할 수도 있고, 반대로 -2도를 더해서 승강타가 8도만 움직이게 할 수도 있다. 그 결과 속도에 관계 없이 항공기는 항상 조종사가 원하는 10도 만큼만 기수가 들린다. 이것은 어디까지나 조종사의 입력 값에 +/- 하는 개념. 이를 CAS(control augment system)라고 한다.
CAS는 주로 앞서 언급한 유압시스템에 적용되었다. 즉 조종사의 일차적인 조종간 움직임은 유압으로 조종면까지 전달되며, 거기에 더해 전기적 제어 시스템이 유압밸브를 좀 더 열거나, 혹은 좀 덜 열거나 하는 신호를 추가로 보내주는 것이었다. 이는 과거에는 전기시스템이 지금처럼 신뢰도가 높지 않았기 때문이다. 만에 하나 전기시스템이 전부 맛이 가버려도 최소한 유압시스템은 남아있으므로 이 방식이라면 어떻게든 조종은 가능하다. F-15계열기가 바로 이 CAS를 사용중이다. [9]
그리고 플라이 바이 와이어 시스템은 조종사의 조종간의 움직임이 전기신호로 변경되어 컴퓨터로 입력된다는 개념이 다르다. 즉 CAS는 조종간의 움직임이 일단 직접적으로 유압을 거쳐 조종면에 전달된 다음 거기에 전자제어 시스템이 보조한다는 개념이었다면, 플라이 바이 와이어 시스템은 아예 조종간의 움직임 자체도 컴퓨터를 거치게 된다.
이 경우 조종간과 조종면 사이에 유압시스템이 없으므로 무게가 가벼워지지만 대신 컴퓨터가 망가지거나 오작동을 일으키면 조종사는 조종면을 움직일 방법이 없어진다. 그래서 보통 플라이 바이 와이어 시스템을 사용하는 항공기는 동일한 비행제어 컴퓨터를 3~4개 정도 탑재하며, 스스로 끊임 없이 이상을 체크하고 만약 개중 하나가 이상이 발견되거나 죽어버리면 이 컴퓨터의 계산결과는 무시하고 나머지 컴퓨터들의 출력 값만 최종적으로 조종면에 전달된다.
물론 컴퓨터가 뭔가 대단한 인공시스템을 탑재했다거나 하는 것은 아니다.[10] 즉 속도 이만큼, 고도 이만큼 일때 조종간에서 입력 값이 얼마가 들어오면, 그 출력 값은 얼마가 되어야 한다라는 수식을 만들고 그 수식을 토대로 제어 소프트웨어가 있어야 한다. 결국 이 소프트웨어를 짜는 몫은 사람의 몫. 요즈음 괜히 항공기 개발할 때 소프트웨어 개발비가 전체 개발비의 20~40%를 차지한다는 말이 나오는 것이 아니다.
최근에는 이러한 개념을 조종면 뿐만 아니라 엔진에도 적용 중이다. 과거에는 쓰로틀(출력제어 레버)를 밀거나 당기면 기계적으로 엔진에 직접 들어가는 연료량이 바뀌는 식으로 움직였기 때문에 조종사의 무리한 조작, 혹은 지나치게 급격한 조작에 의하여 엔진이 꺼져버리거나 이상작동을 하는 경우가 있었다. 그러나 현재는 엔진의 상태를 컴퓨터가 체크하고, 조종사가 쓰로틀을 움직이면 컴퓨터가 그 신호를 받아들인 다음 적합하게 엔진의 RPM을 조절하는 방식이 쓰이고 있다. 다행히 자동차처럼 급발진 사고는 없는듯 하다. 보통은 개발 중에 프로토타입들이 추락할 거 다 하기 때문에 양산형이 사고를 치는 경우는 그리 많지 않다.
수호이가 개발한 초음속 폭격기 T-4에 이러한 플라이 바이 와이어 시스템이 처음 적용되었다고 하는데, 사실 만약을 대비하여 기계적 백업시스템이 들어간 개념이다. 기계적인 백업 없이 모든 제어시스템이 전선 및 컴퓨터로 연결된 것은 F-16이 최초.[11] 현재는 플라이 바이 와이어의 여러 이점 때문에 민항기에도 많이 쓰이는 추세다.
이러한 제어기술의 발전 덕에 F-16은 또 다른 특징을 가질 수 있었는데 바로 정안정성 완화라는 개념이다. 항공기를 안정적으로 만들려면 필연적으로 기동성이 떨어지며, 또 꼬리날개가 커져서 그 만큼 무게와 공기저항이 늘어난다. 그런데 항공기를 고의로 불안정하게 만들면 기동성을 더 좋게 만들 수 있고 꼬리날개도 작게 만들 수 있는 대신, 조종사가 잠깐 조종간을 놓거나 정줄을 놓거나 하는 상황에서 항공기는 기수가 돌아가거나 기수가 위로 들리거나 하게 되며, 심하면 통제불능의 상태에 빠진다. [12] 그런데 플라이 바이 와이어를 도입하면 불안정한 항공기도 컴퓨터가 1초에도 수십, 수백번 현재 항공기의 상태를 측정하여 기수가 돌아가려 하거나 하면 바로바로 미세하게 조종면을 움직여준다. 즉 조종사가 가만히 있어도, 조종사가 조종간을 움직이기 전까지 현재의 비행코스를 컴퓨터가 알아서 유지해준다는 것이다. FBW가 없는 상황이었다면 조종사가 가만히 있으면 계속 고개가 돌아가거나 해서 비행코스를 유지할 수 없었을 것이다.
이를 가지고 록히드 마틴의 유명한 개발팀인 스컹크 웍스가 말하길... FBW와 적절한 추력을 가진 엔진만 있으면 자유의 여신상도 날릴 수 있다고 할 정도. 실제로 F-117은 기괴한 각진 형상 때문에 항공기가 공기역학적으로 매우 불안정 했으며, 만약 컴퓨터의 도움이 없었다면 조종사는 비행코스를 유지하기도 벅찼을 것이다.
하지만, FBW자체가 비행능력을 부여하는 것은 아니다. 어디까지나 불안정한 비행모델을 안정화 시키는것. 위에 나온 자유에 여신상도 충분한 엔진추력으로 자유의 여신상을 들어올리고, FBW장치로 방향전환을 하게 해준다는 소리고, 엔진출력도 부족하고, 날개의 공력도 부족한데 FBW만 장치시키고 날게 해달라고 하면 곤란하다.
미군의 폭격기인 B-2 스텔스 폭격기의 경우 이 보다 더 발전된 FBL (Fly By Light)라고 해서 구리전선이 아닌 광케이블을 사용한다. 다만 이건 B-2와 V-22같은 레어한 비행기만 채용되었다. 그 이후에도 FBW는 F-22나 F-35 등 새로이 개발되는 항공기들에 폭넓게 사용되고 있다.
다만 문제점이 있다면 핵전쟁 상황에서의 EMP를 맞으면 모든 조종시스템이 맛이 갈 것이라는 점. 근데 자동차 시동 플러그도 맛이 가버릴 정도의 EMP를 맞으면 유압식이나 기계식 할거 없이 엔진이고 뭐가 다 맛이 가서 떨어질듯 하니 별 상관은 없을지도..? [13] [14]
비슷한 개념으로 자동차에 적용된 TBW가 있다. 이 쪽은 비행기처럼 조종간과 출력 모두 제어하는 것이 아니라 출력만 제어하는 쪽. 조종간은 MDPS를 적용하면 된다.- ↑ 이 때문에 제1차 세계대전, 제2차 세계대전 당시 전투조종사들은 급기동을 위해 양손으로 조종간을 움켜쥐고 힘껏 당기는 경우가 종종 있었다. 하워드 휴즈의 목제 수송기, 허큘리스 항목에도 관련 문제로 조종성이 매우 나빴다는 언급이 나온다.
- ↑ 이 경우에는 사람의 힘 + 유압의 힘
- ↑ 현재 쓰이는 항공기의 유압시스템 압력은 3000 psi, 200기압에 해당하는 힘이다.
- ↑ 즉 유압시스템 중 한 시스템의 유압이 새어나가도 나머지 시스템들을 백업으로 쓸 수 있다.
- ↑ 최근에는 기술의 발전으로 일부 조종면은 전기모터를 쓰는 항공기도 나오고 있긴 하다
- ↑ 방향타나 승강타 등
- ↑ 이 모습이 영화 멤피스 벨에 잘 묘사되어 있다.
- ↑ 이 방식은 주로 기수의 방향, 즉 요잉 제어에 쓰였다. 기수가 좌우로 흔들리는 움직임을 완화시킨다 하여 요우 댐퍼 시스템이라 부른다.
- ↑ F-15C/D까지는 전자 제어시스템도 아날로그 방식이었으나, F-15E 부터는 전자제어시스템이 디지털 방식으로 바뀌었다.
- ↑ 컴퓨터라고는 하지만 초기에 등장한 플라이 바이 와이어 시스템들은 지금 같은 디지털 컴퓨터가 아니라 각종 회로를 통해 계산되는 아날로그식 컴퓨터를 사용했다.
- ↑ 물론 시험기로 따지자면 그 이전에도 이미 플라이 바이 와이어를 적용한 것이 있었다. T-4와 F-16이 아날로그 플라이 바이 와이어 시스템을 가지고 아웅다웅하는 사이, NASA는
외계인을 갈아 넣어F-8 크루세이더를 개조한 항공기에 디지털 플라이 바이 와이어 시스템을 집어 넣고 실험하고 있었다. - ↑ 사실 최초의 비행기인 라이트 형제의 플라이어 1호도 불안정한 항공기였다. 형제가 글라이더로 끊임 없이 연습한 끝에 제어가 가능했던 것 뿐.
- ↑ 그러나 원래 제트 엔진은 시동에만 점화가 필요하고 일단 걸리고 난 뒤에는 자체의 불꽃만으로 연속적인 연소가 일어나기 때문에 점화플러그가 필요하지 않다. 전기전자 시스템이 날아간다 해도 조종계통이나 기관계통이 전부 기계식인 1~2세대 전의 제트기들은 EMP가 터져도 멀쩡히 잘 날아다닐 것이다. 기계식 백업이 들어간 비행기들도 날아다닐 거고.
- ↑ 요즘 자동차의 경우 점화컨트롤에 ECU가 개입을 하지만, 구형 프라이드처럼 캬브레터+배전기 방식의 경우 그런거 없이 그저 기계식 회전자가 배전기를 돌리면서 전기를 점화한다. EMP같은거 상관없엉. 그리고 그때당시 나온 경유자동차도 시동끌때 솔레노이드 벨브에 전기를 공급하는 전선기구만 전기장치가 관련되어있고 다른부분은 전부 기계식. 시동을 막는 솔레노이드 밸브내 동그란 쇠구슬만 뽑아버리면 전기장치랑 상관없이 운전이 가능하다. 단, 시동켤 때는 밀어서 걸고 시동 끌 때는 브레이크 밟고 기어넣고 클러치 콱 때어서 강제로 시동을 꺼야한다. 시동 끄는 장치가 고장난 옛날 디젤 차들은 이런 식으로 시동끄고 다니는 경우도 있다.